街景行业解决方案
街景数据的采集系统作为一种移动测量系统是当今测绘行业前沿领域之一,主要 是在机动车上装配全球定位系统(GPS)、视频系统(全景相机)、惯导系统(INS) 等传感设备,在车辆高速行进中,对车辆前后左右上下各个方向进行快速扫描和 摄录,经过处理后,制作成毎个采集点的全景地图,通过点与点之间的无缝切换, 实现街景地图服务。
目前,国内主流的街景采集系统都是将单反相机安装到特定的支架平台上,再将 平台固定安装到专用的作业车辆上,利用多台不同角度的相机获取全景数据。而 多台单反相机的方案很难实现不同传感器之间的精准时间同步匹配,由于时间同 步精度不够高,更会导致系统数据采集频率以及位置精度的降低。PHITITANTS 全景相机是专为街景采集设计的高度一体化集成拍摄解决方案。能够实现统一曝 光,精准同步。
技术优势
- 高精度
全景图像采集 -
PHITITANS由6组超广角非球面定焦镜头和6组1200万的CMOS传感器组成,可以拍摄最高7200万像素的高清全景, 并且内置9轴陀螺仪和GPS芯片
- 图像处理
云节点服务 -
图像处理云节点工作站,内置生成服务可以完成全景照片的批量缝合、纠偏和重新曝光,内置云节点框架可以完成多 台处理机的组队和并行处理。
- 结合GIS编辑
-
全景编辑系统集成了专业的全景漫游制作工具,能够将GPS数据、地图地理信息以及全景照片高精度融合,呈现真正 的三维实景地图。
- 二次开发支持
-
系统提供JS脚本库KrPanoPlayer,您可以将全景发布部分集成在您的B/S系统中,系统还支持外部地图导入,瓦块地 图支持EPSG:900913编号标准(google使用此标准),矢量地图支持Mapinfo格式的WGS84坐标系矢量图。
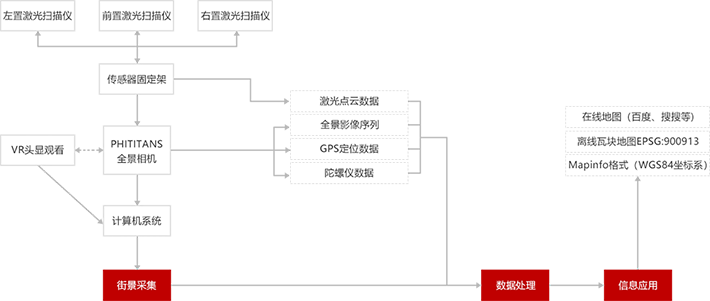
方案描述